Gyro Failure!
Welcome to my drone making blog! Here's a story about how I finally stopped my S500 from flying off backwards.
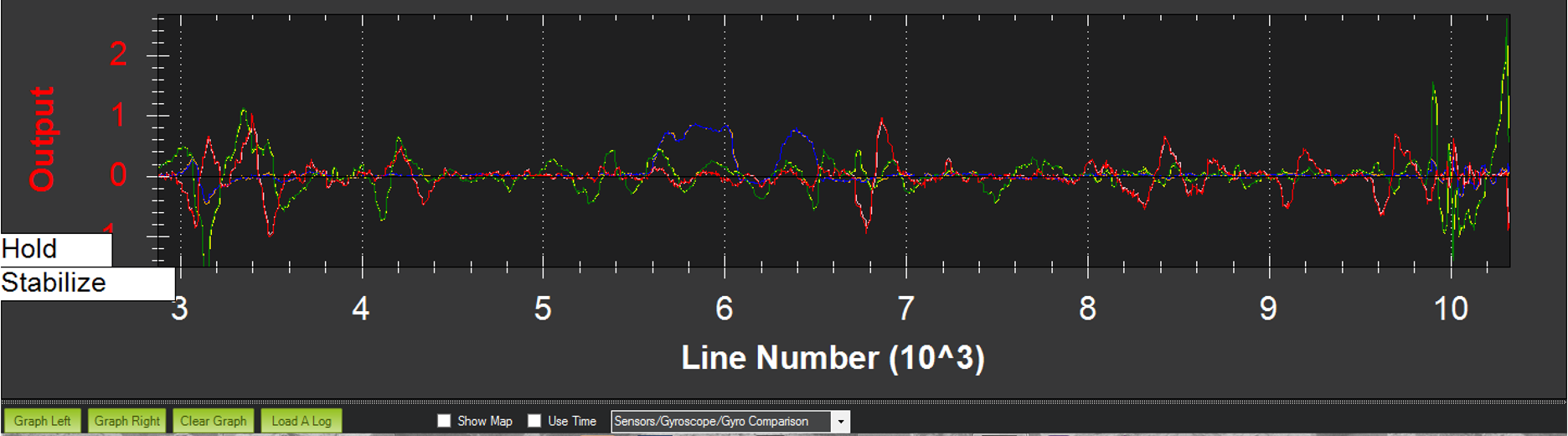
It turns out that one axis of one gyro chip in my PixHawk Lite flight controller was failing at high temperatures. The PX4 hardware design calls for two gyros, in part for compatibility with past software versions, but also to allow for redundancy. However, Copter version 3.3.3 will always use both so we really just get twice the chance of failure. If either gyro fails, your drone will almost certainly crash. However, having two DOES allow us to diagnose this problem easily! In this first log segment, you can see the pairs of traces from the two gyros tracking nicely.
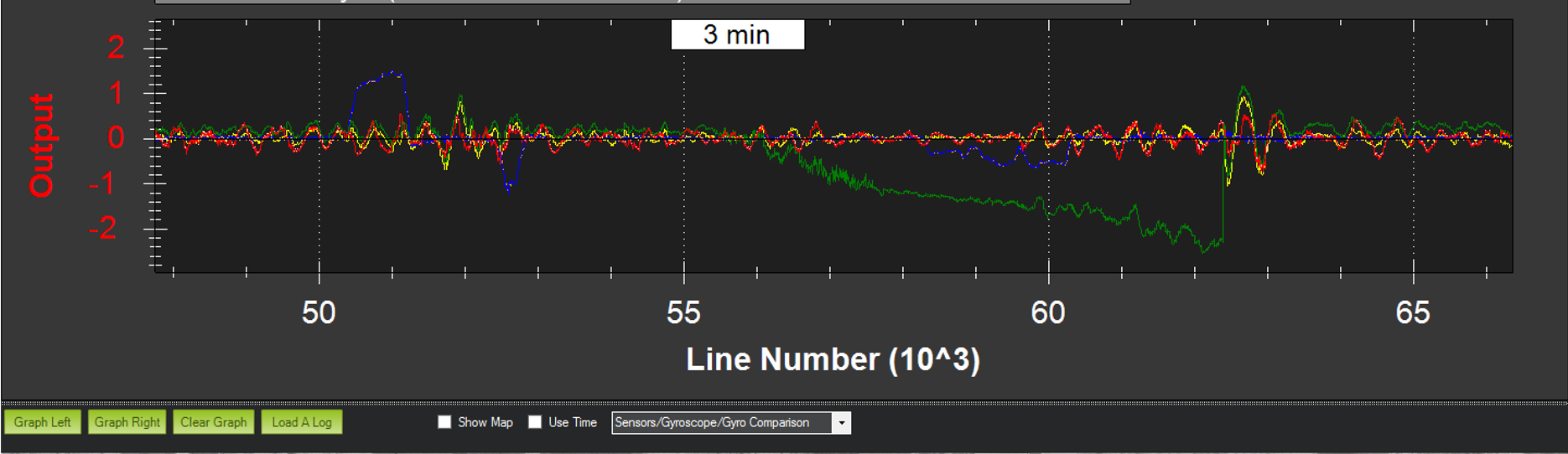
In this second log segment, the green line, which represents the first gyro's y-axis, diverges from the yellow line, which is the second gyro's y-axis. Without having two gyros, and an advanced flight controller that can take detailed logs, I don't know if I ever would have been sure what was happening.
Once I knew what was wrong, I was also able to find a solution. By setting the parameter INS_USE to "disable", I can make the controller ignore the first, failing gyro. Since I have changed this, I've had zero strange flyaways! Now I have added a three axis gimbal, a camera, and video transmitter complete with on-screen display of telemetry data, but that's a story for another day.
- admin's blog
- Log in to post comments